

T0129-PTesting of a Microgravity Rock Coring Drill Using Microspines
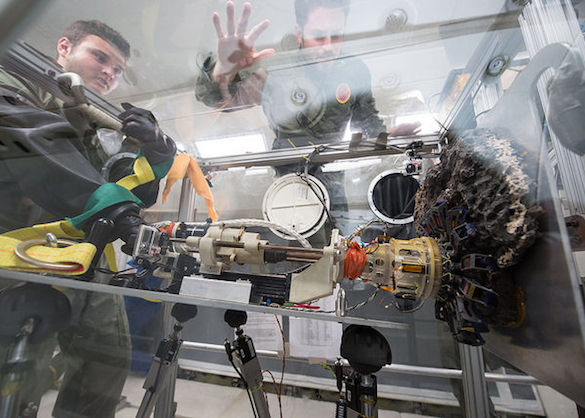
Testing of a Microgravity Rock Coring Drill Using Microspines
PI: Aaron Parness, Jonathan King (Co-I), NASA/Jet Propulsion Laboratory
PI: Aaron Parness, Jonathan King (Co-I), NASA/Jet Propulsion Laboratory
Technology Areas (?)
- TA04 Robotics, Tele-Robotics and Autonomous Systems
- TA07 Human Exploration Destination Systems
Future Customers
This technology could be used in the upcoming asteroid redirect mission to grip large boulders during the robotic mission or acquire core samples from rocks that are too large for the crew to transport back to Earth in their entirety. In the long term, the technology could enable the robotic exploration of lava tubes that have been observed on Mars and the Moon.
Technology Details
-
Selection DateAFO8 (Apr 2014)
-
Program StatusCompleted
- 1 Parabolic
Successful FOP Flights
Development Team
-
PIAaron Parness
-
PI Organization
-
Co-IJonathan King
-
Co-I Organization
-
SponsorNASA
-
More Information