

MOJO-Micro: Multi-Orthogonal Jaunting rObot in Microgravity
PI: Neil Gershenfeld, Massachusetts Institute of Technology
PI: Neil Gershenfeld, Massachusetts Institute of Technology
- TA04 Robotics, Tele-Robotics and Autonomous Systems
- TA12 Materials, Structures, Mechanical Systems and Manufacturing
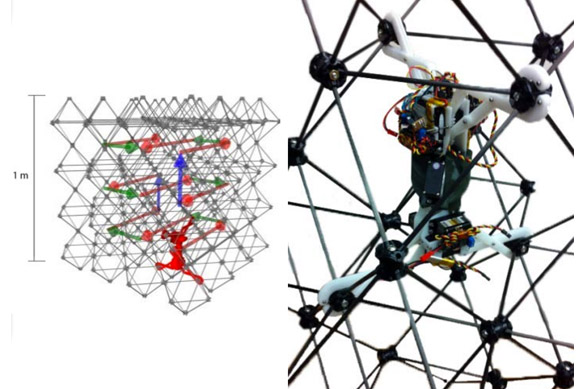
Automated assembly of large space structures is critical in NASA’s roadmap for space technology. State of the art framework construction robots use multi-degree of freedom (DOF) manipulators with linear railways to move around a structure. Truss traversing robots locomote within structures using the layout of struts and nodes. Robots designed relative to the structured environment in which they operate have distinct advantages over general solutions, including simplification of sensing, kinematics, and number of DOFs.These “relative robots” align with Objective 1.1 of the NASA 2014 Strategic Plan, enabling repairable, large-scale, deep-space habitats and vehicles, as well as several TA12 topics such as lightweight structures.
After performing locomotion and maneuvering in a simulated operational environment, MOJO will be at TRL 5. Successful flight testing will advance the state of the art by providing an autonomous traversal and inspection platform of extremely large structures in microgravity environments.
MOJO will assist and enable the automated assembly of large space structures, for NASA scientific missions as well as deep-space habitats and exploration platforms. Specifically, MOJO can perform autonomous structural health monitoring and inspection of large space structures
Technology Details
-
Selection DateREDDI-F1-16 (Jul 2016)
-
Program StatusCompleted
- 2 Parabolic
Development Team
-
PINeil Gershenfeld
-
Organization
-
SponsorMassachusetts Institute of Technology
-
More Information