

T0195-BDraper Multi-Environment Navigator High Altitude Balloon Campaign
Draper Multi-Environment Navigator High Altitude Balloon Campaign
PI: Brett Streetman, Courtney Mario (Co-I), Draper Laboratory Inc.
PI: Brett Streetman, Courtney Mario (Co-I), Draper Laboratory Inc.
Technology Areas (?)
- TA04 Robotics, Tele-Robotics and Autonomous Systems
- TA09 Entry, Descent and Landing Systems
Problem Statement
As exploration reaches further into the solar system both human missions and a multitude of smaller craft will need to perform Entry, Descent & Landing (EDL) to complete their missions.
Technology Maturation
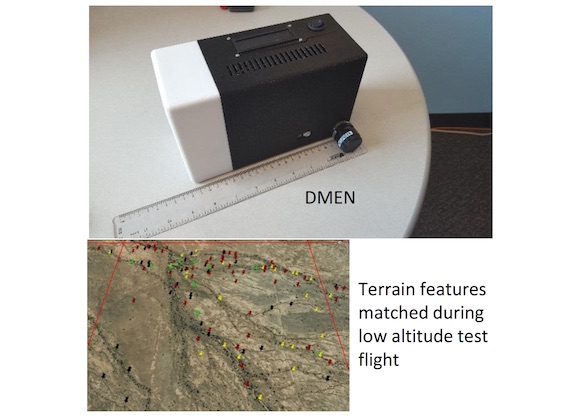
Before the flight test, DMEN was at a TRL level of 6-7 for both ground and low-altitude operations. Its descent function, however, required a near-space environment before it could advance from TRL 4. Two balloon flights successfully validated the system’s sensors and algorithms in a high-altitude environment, advancing the technology to TRL 6.
Future Customers
• NASA or commercial human and robotic missions requiring EDL
• Astronaut tracking
• High-speed drones for the Defense Advanced Research Projects Agency
• Guided parafoils for the U.S. Army
Technology Details
-
Selection DateREDDI-F1-17A (Nov 2017)
-
Program StatusActive
- 2 Balloon
Successful FOP Flights
Development Team
-
PIBrett Streetman
-
PI Organization
-
Co-ICourtney Mario
-
Co-I Organization
-
SponsorDraper Laboratory Inc.
-
More Information