

T0248-PMicrogravity Testing of the Dual Rasp Sampling Tool/System
Microgravity Testing of the Dual Rasp Sampling Tool/System
PI: Mircea Badescu, Paul Backes (Co-I), NASA/Jet Propulsion Laboratory
PI: Mircea Badescu, Paul Backes (Co-I), NASA/Jet Propulsion Laboratory
Technology Areas (?)
- TA04 Robotics, Tele-Robotics and Autonomous Systems
- TA11 Modeling, Simulation, Information Technology and Processing
Problem Statement
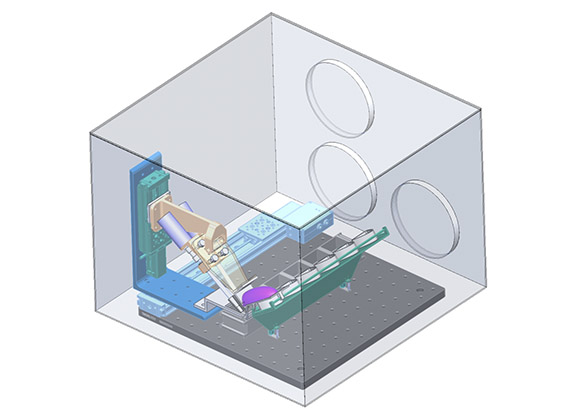
The Dual-Rasp sampling system has two counter-rotating rasp cutters with teeth that remove material from the surface and throws it up between the cutters. The cuttings follow a guide into a sample collection cup. The sample cups retain the sample during acquisition and allow transfer to the instruments later.
Technology Maturation
Successful demonstration will contribute to advancing the TRL from 4 to 5 Microgravity and vacuum testing is needed since the particles trajectories and sample retention capability are expected to behave differently in microgravity than in earth gravity environment.
Future Customers
Potential robotic surface landed missions.
Technology applicable to other low gravity sampling landed missions.
Technology Details
-
Selection DateNASA Directed
-
Program StatusActive
- 0 Parabolic
Successful FOP Flights
Development Team
-
PIMircea Badescu
-
PI Organization
-
Co-IPaul Backes
-
Co-I Organization
-
SponsorNASA