

Caging System for Drag-free Satellites
PI: Robert L. Byer, Stanford University
PI: Robert L. Byer, Stanford University
- TA08 Science Instruments, Observations and Sensor Systems
No additional information available.
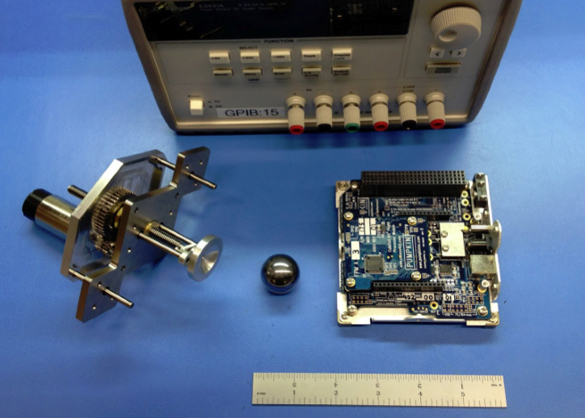
The Caging System for Drag Free Satellites was tested on each of four parabolic flights. This free-flying experiment tested the deployment of a Test Mass in microgravity. During most of the parabolas, the experimenters released the “host” into free flight, and the “host” released a 1” diameter tungsten carbide test mass. On certain parabolas, the free-floating test mass was re-caged by the “host”.
The flyers experimented with a variety of ways to hold the system and release it into free-flight. Video data were collected for un-caging and re-caging operations with six different release attitudes, four different operating speeds, and five different video settings for resolution and frame-rate. Computer vision algorithms will be used to process the video and extract information about the relative motion of the test mass.
At the time of our response to the Announcement of Flight Opportunity, Stanford possessed a working bench-top model of the system. In our proposal, we stated our intention to bring the technology from Technology Readiness Level (TRL) 4 to TRL 6, by testing the system in a relevant environment and improving its fidelity compared with its operational embodiment. In particular, the ability to maintain caging force under random vibration and successfully operate in zero-gravity were put forward as tests in a relevant environment. Installation of the system in a 3U CubeSat structure and integration with CubeSat electronics has moved the system a step closer to deployment.
Technology Details
-
Selection DateAFO5 (Jan 2013)
-
Program StatusCompleted
- 1 Parabolic
Development Team
-
PIRobert L. Byer
-
Organization
-
SponsorNASA
-
More Information