

Autonomous Robotic Capture
PI: Brian Roberts, NASA/Goddard Space Flight Center
PI: Brian Roberts, NASA/Goddard Space Flight Center

- TA04 Robotics, Tele-Robotics and Autonomous Systems
One of the greatest challenges in developing a realistic simulation platform is accurately simulating the dynamic response of a free-floating object. Current ground simulations of on-orbit autonomous robotic capture and servicing do not adequately model the small-scale 3-D contact dynamics between a robot and a satellite. Data collected during the flights is helping to better characterize the current models used in the Goddard Satellite Servicing Center facility at NASA’s Goddard Space Flight Center.
Data collected during the flight campaigns is helping to mature autonomous capture algorithms for a wide range of missions and is also helping to quantify a ground-based dynamics simulation platform at NASA’s Goddard Space Flight Center. Prior to the flights, the autonomous capture technology was at a technology readiness level (TRL)-3. Testing autonomous capture in a relevant environment (i.e., near-zero gravity) raised the TRL to 4 after the flight. The flights also advanced the TRL of the gro
Through this experiment, Goddard’s Satellite Servicing Capabilities Office is advancing technologies and capabilities relevant to several NASA Centers and applicable to critical missions. The autonomous capture algorithms being tested are applicable to any mission involving the capture of non-cooperative clients in space and could also be used for sample return. These capabilities are especially relevant to satellite servicing and debris removal missions. NASA could use the Goddard contact dynam
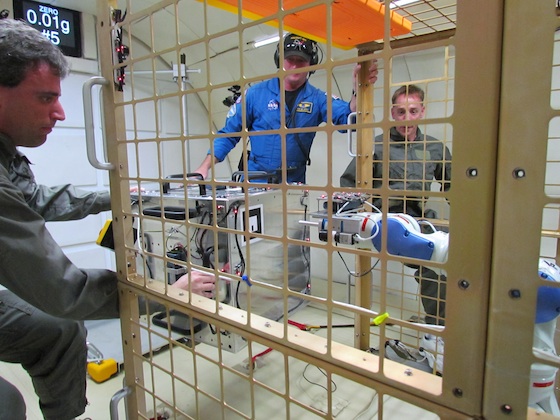
A robotic system with a sensor suite was placed inside a cage on the airplane and commanded to autonomously track and “touch” a free-floating object. The experiment tested the ability of the sensors to extract the key features of the target and calculate their relative position and orientation. It also measured the rate and force with which the robot contacted the object and measured the response of the free-floating target.
The robot and cage were fixed to the aircraft. During each zero-g segment, a massive object was released so that it was free-floating within the cage. The robot used its onboard sensor suite to attempt to track the free-floating object. The robot also contacted the object and a metrology system measured the motion of the robot and object. This data is being used to program robots in Goddard’s Satellite Servicing Center facility to move the same way the robot and the object did on the airplane. The response of the Goddard robot simulating the free-floating object will be compared with the data collected during the flight. The flight data will then be used to “tune” and validate the ground-based contact dynamic simulation.
Technology Details
-
Selection DateAFO1 (May 2011)
-
Program StatusCompleted
- 2 Parabolic
Development Team
-
PIBrian Roberts
-
Organization
-
SponsorNASA
-
PartnersWest Virginia University
Yaskawa America, Inc. -
More Information