

Validating Microgravity Mobility Models for Hopping/Tumbling Robots
PI: Issa Nesnas, NASA/Jet Propulsion Laboratory, Ross Allen (Co-I), Stanford University
PI: Issa Nesnas, NASA/Jet Propulsion Laboratory, Ross Allen (Co-I), Stanford University

- TA04 Robotics, Tele-Robotics and Autonomous Systems
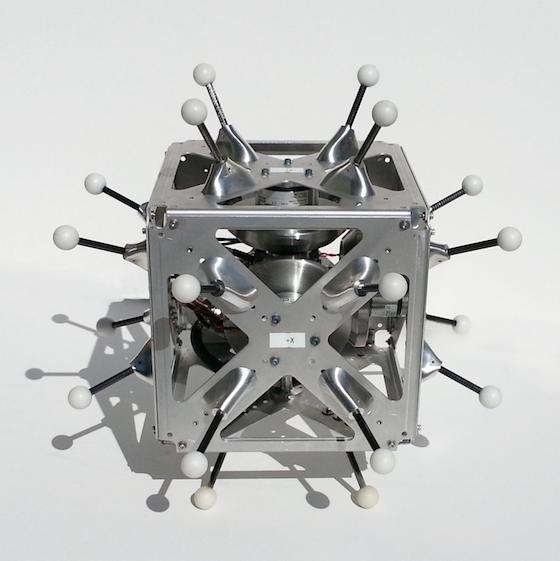
Researchers at Stanford University and at the Jet Propulsion Laboratory have recently been investigating low-mass surface platforms that can traverse the rugged and soft terrains of small bodies, where gravity is extremely low. These platforms impart mobility by generating a reaction force through simple internal actuation mechanisms, enabling them to traverse by hopping (for large surface coverage) and tumbling/shuffling (for fine mobility and instrument pointing). These platforms would position science instruments through a sequence of tumbling and shuffling maneuvers.
To date, these platforms have been validated in ground-based microgravity test beds and in physics-based simulation environments, including testing with granular media simulations. Our team has also conducted constrained experiments using a single degree-of-freedom prototype to demonstrate the ability to hop and tumble on flat, soft and sandy surfaces. Preliminary results from our experiments in physical test beds show agreement with our simulations under certain conditions. However, ground-base
Furthering our understanding of mobility and operations around small bodies would have relevance to both NASA's Science Mission Directorate as well as Human Exploration Mission Directorate, thus helping the Space Technology Mission Directorate accomplish its crosscutting capabilities goals.
The primary experiments will study the dynamics of hopping and tumbling, and additional best effort experiments will examine the landing impact following hops and demonstrate attitude control during ballistic hops. The experiments will help us characterize limitations of ground-based test beds and simulations and further our understanding of microgravity mobility, which has implications for future robotic and crewed missions to asteroids and small moons.
Our payload box is a strapped down, sealed 1m x 1m x 1m enclosure that houses a 7 kg robot and a container enclosing the experimental surface. The container will hold one of three simulant/rock combinations that mimic the surface properties of small bodies. The enclosure will be instrumented with telemetry sensors. We will use the telemetry data to accurately reconstruct the trajectory of the robot during each maneuver. The robot will be rigidly secured inside the payload box during aircraft maneuvering and lightly restrained with electromagnets to counter-act negative gravity fluctuations during zero gravity parabolas.
Technology Details
-
Selection DateAFO8 (Apr 2014)
-
Program StatusCompleted
- 1 Parabolic
Development Team
-
PIIssa Nesnas
-
PI Organization
-
Co-IRoss Allen
-
Co-I Organization
-
SponsorNASA
-
PartnersStanford University (Marco Pavone)
MIT -
More Information