

Autolanding for Robotic Precursor Missions
PI: Kevin Peterson, Astrobotic Technology Inc., William "Red" Whittaker (Co-I), Carnegie Mellon University
PI: Kevin Peterson, Astrobotic Technology Inc., William "Red" Whittaker (Co-I), Carnegie Mellon University

- TA05 Communication and Navigation
NASA's current missions land blindly, targeting large error ellipses in statistically safe terrain. For example, the Curiosity rover targeted a 19x6 km ellipse of benign Martian terrain. While adequate for missions that explore a general region of Mars or the Moon, this level of precision is insufficient for future NASA and commercial ambitions that demand arrival at specific targets. The AAS can deliver payload to within 100 meters of the chosen destination while autonomously avoiding hazards as small as 25cm, enabling precise missions to resources and exploratory targets such as crater rims and caves; serial visits to establish and sustain habitats; and revisiting cached samples gathered on previous missions.
The project proposed by Astrobotic will mature AAS technologies to TRL 6 through end-to-end flight testing on Masten's Xaero vehicle. This sRLV platform is an optimal test environment to mature the AAS to TRL 6. Flights on high-altitude propulsive landers enable unique views unavailable at lower altitudes. These views are necessary to fully test map registration and evaluate transition from map registration to visual-inertial pose filtering.
The trajectories to be flown match the terminal phase of planetary landings, which is necessary for validating hazard detection/avoidance and trajectory planning approaches. Prior work at Carnegie Mellon University has demonstrated closed-loop, autonomous landings of helicopters with LIDAR hazard detection and visual odometry-aided pose estimation. The AAS fills an unmet need for precise, safe autonomous landings, for both NASA and the commercial space industry.
Astrobotic Technology’s autonomous landing technology, the Astrobotic Autolanding System (AAS), successfully landed the Masten Space Systems Xombie, a vertical-takeoff vertical-landing (VTVL) suborbital rocket only using visual registration to a map. The goal for this test campaign was to demonstrate the viability of Terrain Relative Navigation and to demonstrate on-line hazard detection and identification / selection of safe landing locations in a flight-relevant environment.
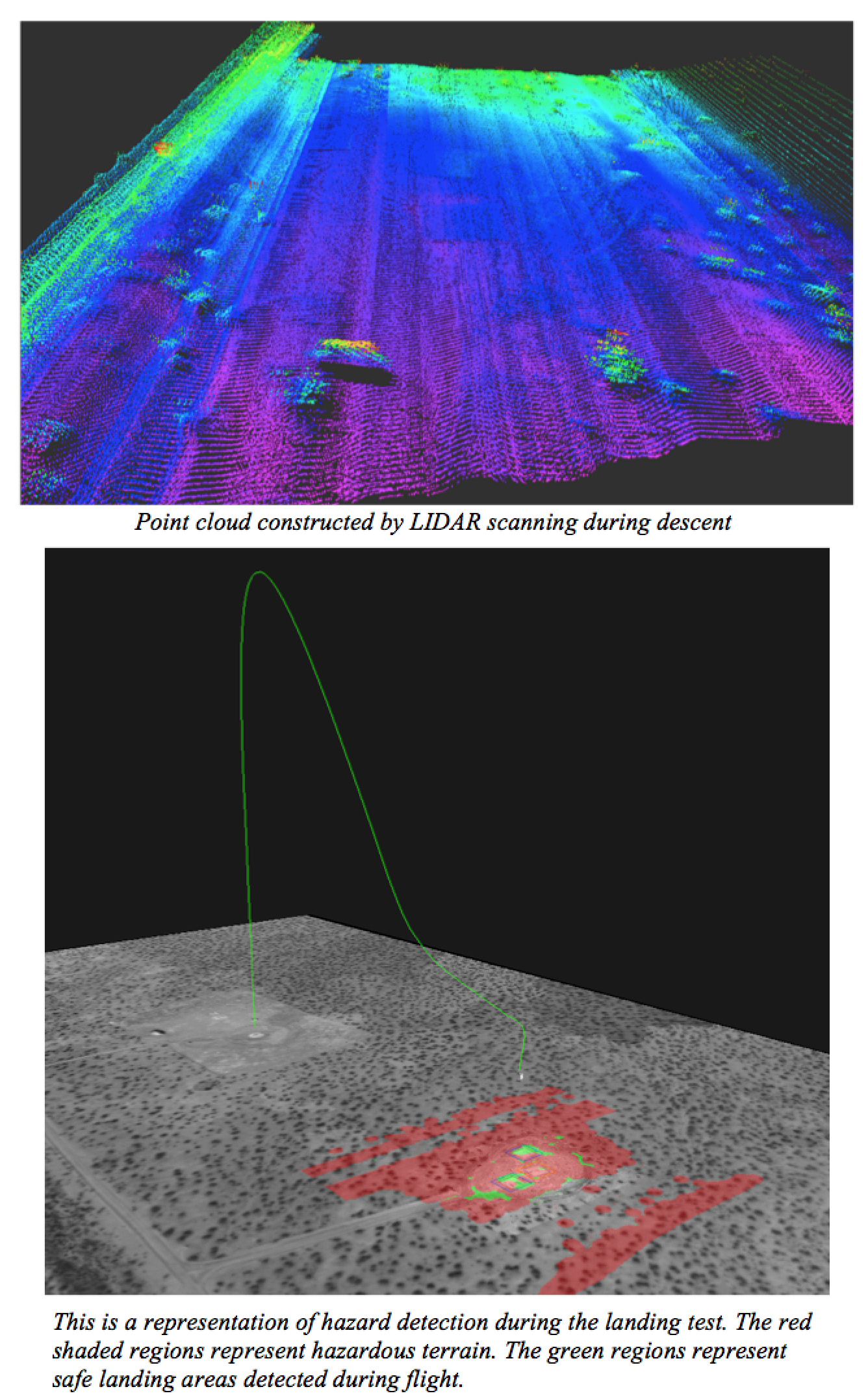
The AAS was mounted on Masten’s Xombie rocket. After launch, Xombie boosted to 260 meters above the ground in 25 seconds. The AAS came online during boost and began comparing its camera images to an onboard map to determine its location and attitude. The AAS accurately tracked the craft's location as Xombie reached apogee and began moving downrange in a descent trajectory. When the craft was 100 meters from the landing point, the AAS began scanning the ground with a LIDAR to construct a point cloud of landing site features. The system analyzed this point cloud to construct a hazard map showing safe landing areas. In this test, the AAS identified hazards larger than 25 centimeters and correctly commanded a safe landing location for Xombie.
This successful closed-loop flight was an end-to-end validation of the AAS’ precision guidance and hazard detection capabilities in a relevant flight environment, and advanced landing technology for precursor robotic missions from Technology Readiness Level (TRL) 4 to TRL 6. TRL 4 status for AAS technologies was demonstrated through autonomous helicopter landings, small rotorcraft flight, and simulation. Prior to these flights, AAS technologies were matured to TRL 5 through integrated test flights on helicopters.
This program matured AAS technologies to TRL 6 through end-to-end flight-testing on Masten’s Xombie vehicle. Flights on propulsive landers provide a realistic environment with unique views unavailable at lower altitudes, which are necessary to fully test Terrain Relative Navigation. The trajectories flown simulate those of planetary landings and are necessary for validating hazard detection/avoidance and trajectory planning approaches. The VTVL platform provided an optimal test environment for the AAS to reach TRL 6.The development focus will now shift to implementing the AAS with space-rated sensors and avionics in order to land Astrobotic’s Griffin lander safely on the Moon.
The flight test was funded by the Flight Opportunities Program of NASA's Space Technology Mission Directorate and conducted at the Mojave Air and Space Port in Mojave, CA. The completed program matures the Astrobotic Autolanding System (AAS) from TRL 4 to 6 through a series of tests on a VTVL. Testing on the VTVL platform helped to uncover and resolve new issues that had previously gone undetected in helicopter testing. The AAS provides the capability for planetary landers to land near specific resources or points of interest near hazardous terrain by avoiding hazards and landing on safe terrain.
Astrobotic Technology’s autonomous landing technology, the Astrobotic Autolanding System (AAS), successfully landed the Masten Space Systems Xombie, a vertical-takeoff vertical-landing (VTVL) suborbital rocket only using visual registration to a map. The goal for this test campaign was to demonstrate the viability of Terrain Relative Navigation and to demonstrate on-line hazard detection and identification / selection of safe landing locations in a flight-relevant environment.
The AAS was mounted on Masten’s Xombie rocket. After launch, Xombie boosted to 260 meters above the ground in 25 seconds. The AAS came online during boost and began comparing its camera images to an onboard map to determine its location and attitude. The AAS accurately tracked the craft's location as Xombie reached apogee and began moving downrange in a descent trajectory. When the craft was 100 meters from the landing point, the AAS began scanning the ground with a LIDAR to construct a point cloud of landing site features. The system analyzed this point cloud to construct a hazard map showing safe landing areas. In this test, the AAS identified hazards larger than 25 centimeters and correctly commanded a safe landing location for Xombie.
This successful closed-loop flight was an end-to-end validation of the AAS’ precision guidance and hazard detection capabilities in a relevant flight environment, and advanced landing technology for precursor robotic missions from Technology Readiness Level (TRL) 4 to TRL 6. TRL 4 status for AAS technologies was demonstrated through autonomous helicopter landings, small rotorcraft flight, and simulation. Prior to these flights, AAS technologies were matured to TRL 5 through integrated test flights on helicopters.
This program matured AAS technologies to TRL 6 through end-to-end flight-testing on Masten’s Xombie vehicle. Flights on propulsive landers provide a realistic environment with unique views unavailable at lower altitudes, which are necessary to fully test Terrain Relative Navigation. The trajectories flown simulate those of planetary landings and are necessary for validating hazard detection/avoidance and trajectory planning approaches. The VTVL platform provided an optimal test environment for the AAS to reach TRL 6.The development focus will now shift to implementing the AAS with space-rated sensors and avionics in order to land Astrobotic’s Griffin lander safely on the Moon.
The flight test was funded by the Flight Opportunities Program of NASA's Space Technology Mission Directorate and conducted at the Mojave Air and Space Port in Mojave, CA. The completed program matures the Astrobotic Autolanding System (AAS) from TRL 4 to 6 through a series of tests on a VTVL. Testing on the VTVL platform helped to uncover and resolve new issues that had previously gone undetected in helicopter testing. The AAS provides the capability for planetary landers to land near specific resources or points of interest near hazardous terrain by avoiding hazards and landing on safe terrain.
Technology Details
-
Selection DateAFO5 (Jan 2013)
-
Program StatusCompleted
- 3 sRLV
Development Team
-
PIKevin Peterson
-
PI Organization
-
Co-IWilliam "Red" Whittaker
-
Co-I Organization
-
SponsorAstrobotic Technology, Inc.